PPS路面激光扫描测量系统是将PPS断面式激光雷达扫描头与惯性导航测量系统(IMU)、倾角仪、里程计、卫星定位仪等其他传感器以及数据采集中央控制计算机组合后搭载在公路机车、铁路机车等运动载具上进行三维点云采集的集成系统。该系统可以在80公里/小时速度下采集空间分辨率达到1毫米的激光雷达影像和距离精度达到亚毫米级的路面几何形状的三维点云。
其主要用途为公路路面、铁路轨道及结构、机场跑道的高精度、高分辨率几何与影像特征获取。
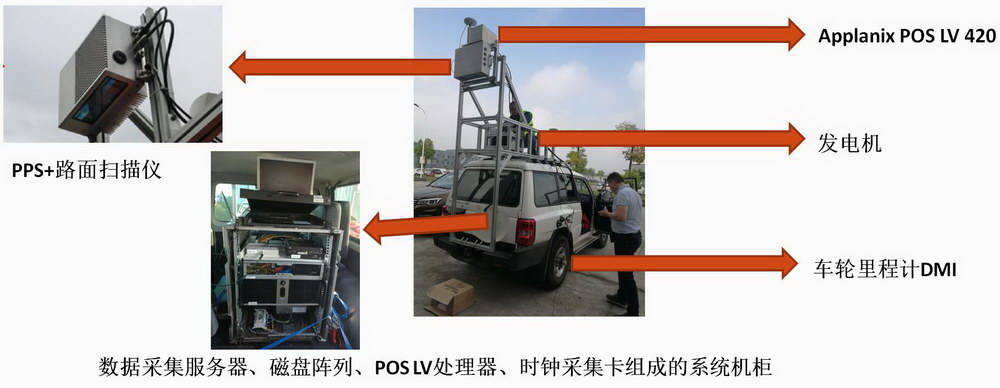
♦ 系统组成
1)激光扫描仪型号: PPS+路面扫描仪;
2)惯性导航测量系统: Applanix POS LV420;
3)系统机柜:数据采集服务器、磁盘阵列、POS LV处理器、数据采集卡;
♦ PPS+扫描仪技术参数
1)几何测量点采集速度:900点/断面,800断面/秒;
3)影像点采集速度: 400万点/秒;
4)影像空间分辨率: 1毫米;
5)单次扫描路面宽度: 4米;
6)扫描距离范围: 1.2米—10米
7)扫描视场角: 70°;
8)激光等级: 1级激光, 人眼安全;
9)防护等级: IP 67 (防尘防水等级);
♦ 惯导测量单元技术参数*
1)独立数据采样率: 200Hz;
2)时钟同步精度: 5毫秒;
3)里程计精度: 0.03%(万分之三);
4)绝对位置精度: XY平面位置:2cm,高程H:5cm;
*使用Applanix POS LV420后处理模式时的技术参数