以某汽车厂涂装车间改造项目为例
一、项目背景
当前我国产业升级换代加快,国内化工厂及企业需要对厂房进行改造扩建,需要拆除、更换、新增大量的设备和管线。而改扩建设计质量的关键取决于对现状的了解程度,现场情况复杂,给设计带来了很大难度,所以如何获取到准确的工厂现状资料就是第一个要解决的问题。
手工测量是传统获取现场资料的最常见并且最经济的方法,但工厂的改造设计是在不停工的前提下进行的,运行时很多区域是人员危险区,不能靠近测量。而且人工测量的误差也往往难以避免,测量的结果不能满足设计的基本要求。我们需要将目光转向更先进和准确的三维激光测量方式。

图1:工作现场
二、项目要求
1.对涂装车间进行高精度全景扫描,获取精确尺寸和颜色,为后续的车间改造提供数据基础;
2.对扫描获得的数据进行拼接并删除与生产线无关的点云数据;
3.对扫描生成的3D点云文件重压缩,重新分割,并转换为 Recap(.rcs/.rcp) 格式与 FARO(.fls/.fws)格式文件,文件需按楼层高度与厂房轴线进行分割,并对每一个文件给出规则的文件名称,原则上要求分割后的点云文件每个不超过500M。
4.扫描的精度要求要求移交的点云文件与现场实物间的误差精度<5mm
三、工作流程
1.点云数据的获取
在开始扫描前熟悉工厂环境,进行扫描站点规划:设备及遮挡物比较少的区域安排扫描站点较少;设备复杂,遮挡物多,工作环境复杂区域,安排扫描站点较多。站点与站点间要布置三个(或三个以上)互相通视的白色标靶球,以便扫描后各站点数据的数据拼接。
为了得到完整的车间整体数据,利用美国FARO最新的S系列三维激光扫描仪 FARO Focus S350对汽车车间进行完整的现场数据采集。

图2:点云数据获取
2.对扫描获得的数据进行拼接
由于汽车涂装车间生产线设备复杂遮挡物多,所以需要多个位置进行扫描,才能得到汽车涂装生产线完整的点云数据。在Faro Scene软件下,将不同测站的点云数据导入,按照目标扫描顺序进行拼接形成完整点云,再分成若干单元,以云际拼接法再次拼接。
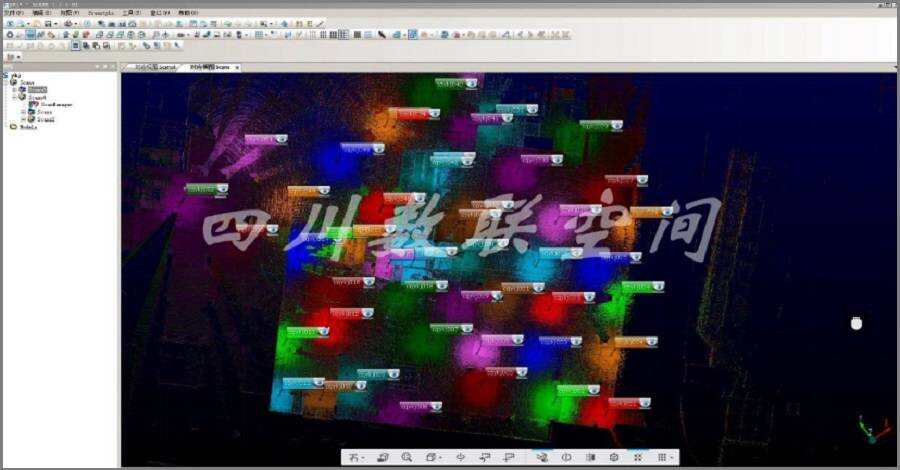
图3:点云数据拼接
3.降噪数据处理及格式转换
因扫描数据往往会很大,所以在整合了厂区的所有点云后,需要对数据进行优化,去除重复点以及噪点,减小数据体积量,提高数据质量。
运用Faro Scene软件对点云进行距离过滤,降低噪音,并对数据按照轴网进行分块。分块完成后导出FLS/FWS文件,利用RECAP软件打开工程文件转换为RCP/RCS格式。
四、总结
应用三维激光扫描技术,我们能够快速高效获得完全真实的汽车车间的三维数据,一方面可将车间的现状三维信息与改造设计的三维模型重合,对比设计模型与现场实际情况,调整设备安装位置与方向,为厂车间规划、改造、决策提供可靠的数据支持;另一方面根据精确的三维的点云数据可建立三维模型,为数字化、智能化工厂提供直观、可靠的数据依据实现三维可视化,将三维模型结合信息管理平台可建立一套完整的基于现场运营现状的、直观的、地理位置准确的、基于数据库服务可快速响应的三维信息系统,供三维浏览、联网查看、检索,为厂区的规划和更新提供直观的数据基础,为安全评估、人员培训、领导层决策、危急事件处理提供现场基础资料等。